





Homag nennt das Ganze eine „Autonome Zelle“, die ihre Flexibilität sowohl im Handwerk als auch in der Industrie, in der Serien- und Losgröße-1-Produktion voll ausspielen könne. Auch für kleine und mittlere Betriebe eröffne das Konzept völlig neue Optionen.
Vollautomatisierte Kantenbearbeitung
Den Start macht die Kantenanleimmaschine Edgeteq S-500 ProfiLine (bisher KAL 370) in Kombination mit der Rückführung Loopteq O-600 (bisher TFU 521). Miteinander vernetzt sind die beiden Elemente durch die Zellensteuerung WoodFlex. Damit die Zelle jedes Werkstück richtig bearbeiten kann, werden alle Teile im Vorfeld mit einer digitalen Identität (Barcode) ausgestattet, die alle Bearbeitungsdaten enthält.
Die neue Edgeteq S-500 ProfiLine ist in der Lage, drei Profile zu bearbeiten und hat gleich drei verschiedene Kantenfügeverfahren an Bord. Die neue 3-Profiltechnik schafft den schnellen, automatischen Wechsel zwischen drei Profilen und Fase 20°. Das „Paket 3-Profiltechnik“ beinhaltet ein Feinfräsaggregat für drei Radien, den 3-Profilkopf am Formfräsaggregat FK30 sowie eine Profilziehklinge für mehr als drei Radien. Wer in kurzen Zeitabständen das Anleimverfahren (PU, EVA, AirTec) wechseln möchte, kann alle drei Kantenanleimverfahren auf einer Maschine betreiben und per Knopfdruck umschalten.
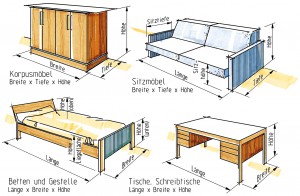
Den vollautomatisierten Teilefluss für die Edgeteq S-500 ProfiLine übernimmt die Werkstückrückführung Loopteq O-600. Hier wurde die automatisierte Rückführung mit einer Stapelanlage kombiniert – so können fertige Werkstücke ausgeschleust oder automatisch abgestapelt werden. Das erledigt das Portal mit breitenabhängiger Drehfunktion und neu entwickelter Vakuumtraverse für schonendes Handling. Die Rückführung ist für ein Teilespektrum von 240 x 80 mm bis 1200 x 3000 mm ausgelegt und in die PowerTouch-Steuerung der Kantenanleimmaschine integriert.
Roboterhandling an vertikaler CNC
Auf der Holz-Handwerk übernahm ein 6-Achs-Roboter das automatisierte Teilehandling beim vertikalen Bearbeitungszentrum Drillteq V-500 (bisher BHX 200). Die Integration in die Zellensteuerung erlaubt Unternehmensangaben zufolge eine sehr einfache Bedienung des Roboters. Zusätzlich lassen sich Funktionen wie Ausrichten, Validieren und Wenden der Teile einfach integrieren. Auch die Implementierung von neuen Werkstücken in den Prozess sei sehr einfach umzusetzen.
Roboterhandling ist sehr prozesssicher und benötigt zudem wenig Platz. Das Handling erfolgt material- und oberflächenschonend. Die automatische Teileidentifizierung erfolgt durch Barcode und Stapelliste.
Verkettung durch fahrerloses Transportsystem
Ein kleiner, autonom arbeitender Logistikhelfer verbindet die beiden vollautomatisierten Zellen und macht aus ihnen eine selbstständig arbeitende Werkstatt: Im Einsatz ist ein fahrerloses Transportfahrzeug namens „Transbot“, das die Bohrzelle mit fertigen Stapeln aus der Kantenzelle versorgt.
Hier sehen Sie das fahrerlose Transportfahrzeug und die autonome Zelle in Aktion:
Durchdachter Materialfluss
Die Werkstücke werden bereits auf der Säge mit einem individuellen Barcode-Etikett versehen und können so am Einlauf der Kantenanleimmaschine eindeutig identifiziert werden.
Dann erfolgt die Bekantung der Teile – je nach Vorgabe ein bis vier Mal. Den jeweiligen Teilerücktransport übernimmt die Loopteq O-600 (bisher TFU 521) ebenso wie das Abstapeln der fertigen Werkstücke. Jetzt kommt Transbot ins Spiel. Das fahrerlose Transportfahrzeug befördert die bekanteten Stapel auf den Roboter-Beschickplatz der CNC-Roboter-Zelle. Ist dieser belegt, wird der Stapel automatisch auf einen Pufferplatz abgestellt. An der CNC-Roboter-Zelle wird die Drillteq V-500 (bisher BHX 200) vom Roboter mit den bekanteten Teilen beschickt. Ist die Bearbeitung erledigt, stapelt der Roboter die Teile ab.
Transbot bringt die Stapel schließlich auf einen Pufferplatz und bewegt eine leere Lastmittelaufnahme (z. B. Palette) vom Roboter-Beschickplatz zum Roboter-Abstapelplatz. Im Anschluss erfolgt der Transport des nächsten fertig bekanteten Stapels zum Beschickplatz der CNC-Roboter-Zelle (aus dem Puffer oder aber von der Stapelanlage des Loopteq O-600).
Gleichzeitig könnten auch weitere fahrerlose Transportfahrzeuge den Stapelplatz des Loopteq mit neuer, leerer Lastmittelaufnahme beschicken.
Software sorgt für smarte Vernetzung
Den Schlüssel zur vernetzten Kommunikation in der Zelle bildet das Homag-Fertigungsleitsystem ControllerMES. Es kommuniziert übergreifend mit den einzelnen Steuerungen der automatisierten Kantenzelle und der CNC-Roboter-Zelle sowie mit der Steuerung des fahrerlosen Transportfahrzeugs. Hier kommt die Transbot-Zellensteuerung zum Einsatz. Diese ist eng mit einem Flottenmanager verbunden, der die komplette Planung der Fahrtrouten übernimmt.
Flexible Verkettung schafft Flexibilität
Die flexible Verkettung von Bearbeitungszellen bietet eine höhere räumliche Flexibilität als eine starre Verkettung, beispielsweise durch Rollenbahnen. Änderungen im Produktspektrum und bei der Bearbeitungsreihenfolge sind jederzeit problemlos möglich. Zudem ist das System bereit für die Anbindung an die Cloud-Plattform Tapio. (cn/Quelle: Homag)
Lesen Sie dazu auch unser Interview mit Ernst Esslinger, Director Methods/Tools/Systems der Homag GmbH.







{kind=link}