


Sauger positionieren auf Bearbeitungszentrum – immer ein leidiges Thema. Entweder weil es, von Hand ausgeführt, Zeit kostet und ungenau, also auch unsicher ist, oder, weil der Aufwand für die vollautomatische Bewegung der Sauger sehr groß und kostenträchtig ist. Bei Saugern und anderen Spannvorrichtungen sind indes große Fortschritte zu beobachten. So z. B. auch bei IMA.
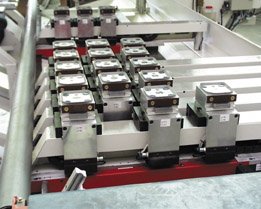
Das Dyna-Point Spannsystem arbeitet vollautomatisch nach Datenvorgaben aus der NC-Saugerpositionierung und ist auch für die kleineren BIMA-Typen geeignet. Der bekannte Traversentisch ist in seiner Grundkonzeption enthalten, d. h. in X-Richtung verfahren mehrere Traversen auf einer Statorbahn, jeweils angetrieben von einem eigenen Linearmotor; auf jeder Traverse sind vier Linearmotore angeordnet, die je einen Vakuumsauger tragen. Die Sauger sind leicht austauschbar. Rund- und Dreiecksformen können viele Spannaufgaben auch dann noch lösen, wenn man herkömmlicherweise schon an Vakuumschablonen denkt. Mit Teach-In können von Hand eingestellte Positionen in das Programm übernommen werden. Die Sicherheit dieses aus der Automobil-Meßtechnik entlehnten Systems wird groß geschrieben. Starke Dauermagnete halten die Motore auf der Statorbahn. Auch hohe Zerspankräfte bringen die Sauger nicht aus der Position. Bei Stromausfall wird die Position ebenfalls dauerhaft gehalten. Die Position jedes Saugers läßt sich mit speziellen Sensoren überwachen.
Innerhalb weniger Sekunden ist das gesamte Saugerfeld umpositioniert; das erfolgt in der Zeit, während der das fertige Werkstück abgenommen und das neue Rohteil aufgenommen wird. n
Teilen:







{kind=link}